*






Humanoid Double-Support Throw
Whole-Body Optimization of Long-Distance Throw for a Humanoid in Double Support
Humanoid Rollover
A Rollover Strategy for Wrist Damage Reduction in a Forward Falling Humanoid
Humanoid Forecast
Bidirectional LSTM-based Network for Fall Prediction in a Humanoid

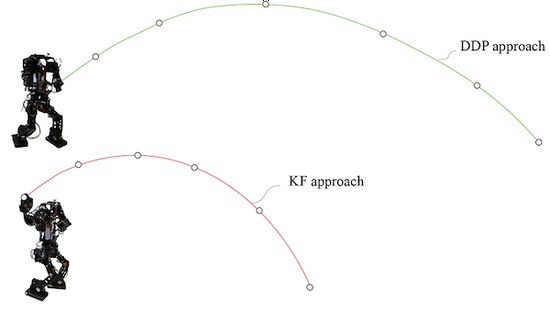
Humanoid Landing
DDP-based Parachute Landing Optimization for a Humanoid
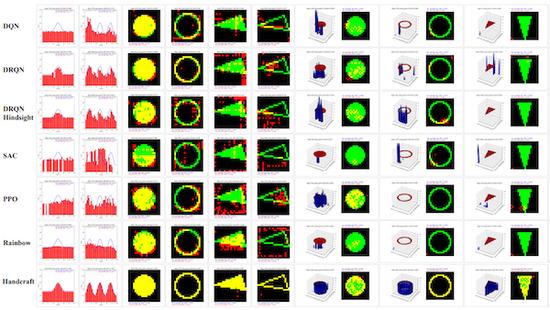
Deep mobile printing
Simultaneous Navigation and Construction Benchmarking Environments

Sphere Joint Mechanism
Hard Ware Development and Control of Novel Sphere Joint Mechanism
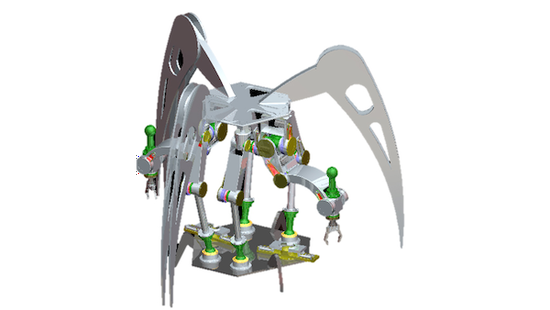
Reconfigurable Parallel Robot
Automatically Reconfigurable Parallel Walking Robot Design with Manipulators
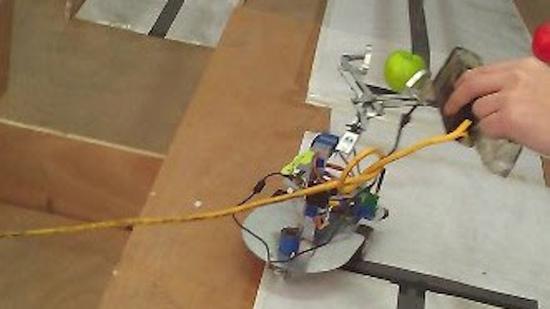
Fruit Picking Robot
Hard Ware Development and Programming of Smart Fruit Picking Robot Car
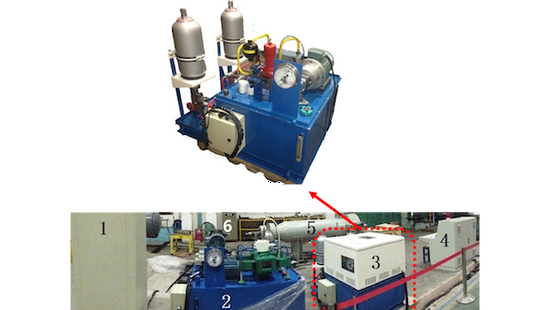
Hydraulic Pressure Control
Structural Design and Experiment with Fuzzy-PID Control for the Hydraulic Pressure Control System