*





人形机器人——双脚支撑投掷
双脚支撑时人形机器人远距离投掷的全身运动优化
人形机器人——跌落翻滚策略
一种前倾类人机器人减少手腕损伤的翻滚策略
人形机器人——在线跌倒预测
基于双向长短时记忆的人形机器人跌倒预测网络

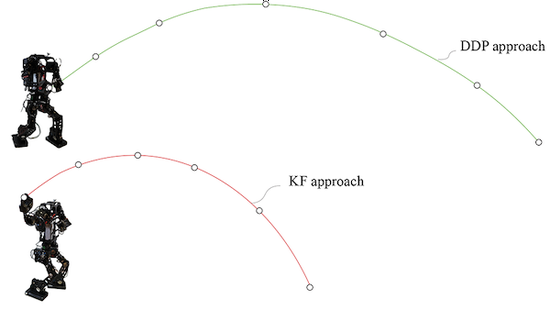
人形机器人——高速滑翔着陆
基于微分动态规划的人形机器人伞降着陆运动优化
建筑打印移动机器人
同步导航和建造基准环境

球体关节机构
新型球体关节机构的硬件开发与控制
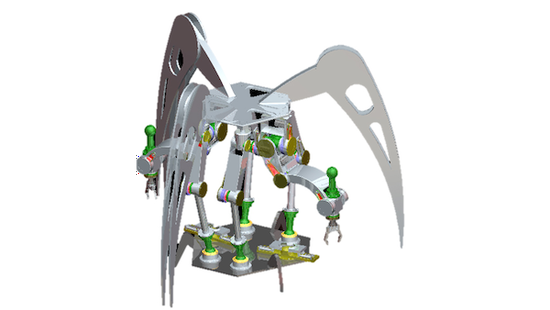
并联可重构机器人
6-URS并联可重构机器人系统设计
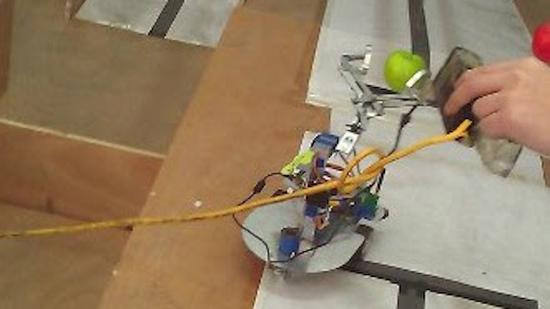
球形果采摘机器人
智能球形果采摘机器人车硬件开发与控制
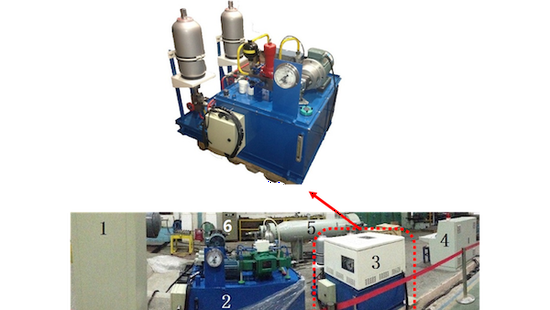
液压传动控制
电液力控制的密闭水腔控制系统